您好,欢迎访问这江苏丽浮

专注管材成型设备生产
管材加工成型设备专业制造商
全国服务热线18796838612
全国服务热线18796838612
技术领域:
本实用新型涉及一种管材切割设备,特别是一种数控金属圆管秋葵app福引导入口。
背景技术:
目前,在各种秋葵app福引导入口中,钢管通常是旋转的,刀具仅作进给运动。 由于钢管原材料长度较长,其旋转产生的振动和噪音很大,很难保证切割的精度,而且切割速度也很快。 对于超过4米的钢管,很容易损坏,根本无法切割; 另一种秋葵app福引导入口不旋转钢管,刀具旋转进给,可以切割长钢管,但其进给运动是手动完成的,蜗轮副,丝杠螺母副,圆柱凸轮,齿轮差速器,拨叉,滑块等传动结构复杂,传动变形大,手动进给不均匀,难以保证切割质量,效率低。 目前还没有数控全自动秋葵app福引导入口。 送料、装夹需要大量辅助时间,劳动强度大,效率低。
发明内容
本实用新型提供了一种效率高、切割质量好、劳动强度轻的全自动数控秋葵app福引导入口。
全自动数控秋葵app福引导入口包括机体(1)、切割系统(8)、送料夹紧系统、数控系统(9)、冷却系统(15); 切割系统有主轴(7),其顶部固定有进给电机(25),电机通过齿轮(20)(23)(24)带动螺杆(19)旋转。 丝杆(19)使滑块(18)作直线运动,滑块(18)上装有刀具(26),可利用电机(25)的正反转来实现切削工具(26)的切入和切出运动。 电机(26)的电源经过电刷(4)和电环(5)引入,在电机(26)和滑块(5)的对称点处安装有相应的配重块(21)(22)。 18)保证主轴(7)转动的动平衡。
送料夹紧系统由固定夹具(16)、活动夹具(14)、电动丝杠螺母传动副(13)组成。 固定夹具(16)用于夹紧工件(12)进行切割。 它仅用于切割。 松开和夹紧动作就足够了; 活动夹具(14)的结构与固定夹具(16)相同,但其整体安装在导柱(11)上,其上安装有电动螺杆(14)。 由电动螺杆(14)带动可左右移动。 主要起喂料作用。 同时,在切割时还可以将工件(12)与固定夹具(16)一起夹紧,起到双重夹紧作用; 固定钳(16)和活动钳(14)均为电动钳,由电机(27)、齿轮传动副(29)(30)(31)(32)、丝杠传动副( 33)(34)、夹紧块(35)(36)组成。 电机通过齿轮(29)(30)(31)(32)带动螺杆(34)(39)旋转。 螺杆(34)(39)是双旋转螺杆。 螺杆(34)(39)的旋转使螺母(33)(37)(40)(41)同时向内或向外移动,带动夹紧块(35)(36)将工件夹紧。工件(7)或松动; 数控系统(9)控制进给电机(25)、进给电机(13)和两个电动夹电机(27)。 数控系统(19)借用数控车床的双轴数控系统,进给电机(25)和进给电机(13)均为步进电机或伺服电机,由X轴和Z轴控制分别发挥作用。 两个电动夹钳电机(27)为减速电机,由数控系统的M或S功能控制。 同时并联有手动控制电路(10),可进行手动控制。
本实用新型采用进给电机(25)与主轴(7)一起旋转的结构,大大简化了旋刀切割方式的机械结构。 采用数控系统,实现全自动控制,提高切割效率和切割质量,减轻劳动强度。 。
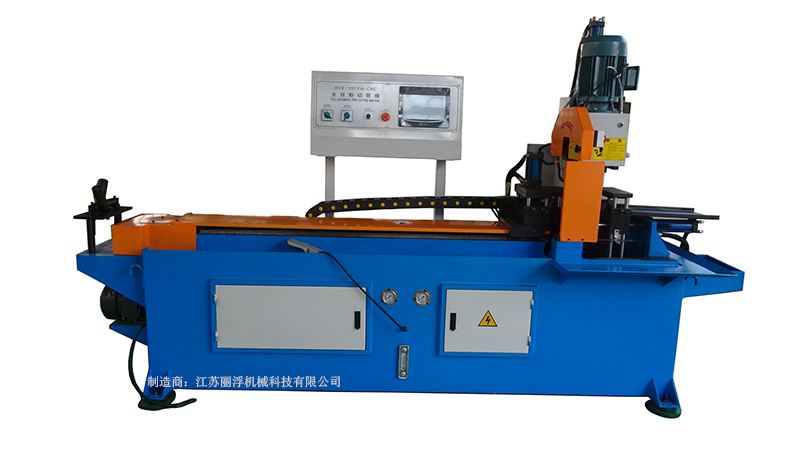
图1是本实用新型的结构示意图。 图2、图3、图4分别为切割系统的三视图结构示意图。 图5是夹钳的结构示意图。 具体实施例。
如图1所示,本实用新型由机身(1)、切割系统(8)、夹紧送料系统、数控系统(9)、冷却系统(15)组成。 切割系统(8)由主电机提供动力。 (17)、将滑轮(2)穿入。
如图2、3、4所示,切割系统(8)由电机(25)、齿轮(20)(23)(24)、螺杆(19)、滑块(18)、刀具(26)组成。 、及配件。 它由配重块(21)(22)和外壳组成。
如图5所示,夹紧夹具由电机(27)、电机齿轮(29)、螺旋齿轮(30)(32)、中间齿轮(31)、双旋转螺杆(34)组成。 (39)。 它由调节螺母(33)(37)(40)(41)、夹紧块(35)(36)、支撑座(28)(38)组成。
一种数控全自动秋葵app福引导入口,如图1所示,包括机体(1)、切割系统(8)、送料夹紧系统、数控系统(9)、冷却系统(15)和电源系统。 ; 主轴(7)通过轴承(3)安装在机身(1)上。 主轴(7)左端安装有二速皮带轮(2)。 主电机(17)的动力可通过皮带轮(2)驱动主轴(7)。 旋转时,主轴(7)中部安装有电环(5)。 电环(5)通过绝缘尼龙套(6)与主轴(7)隔离。 与电环(5)对应安装有电刷(4)。 进给电机(25)的动力通过电环(5)和电刷(4)引入。 切削系统(8)安装在主轴(7)的右端,如图2、图3、图4所示。进给电机(25)固定在主轴(7)上。 电机(25)通过齿轮(24)(23)(20)驱动螺杆(19)旋转。 螺杆(19)带动滑块(18)移动。 直线运动,切削刀具(26)安装在滑块(18)上,通过电机(25)的正反转来实现刀具(26)的正反转运动; 电机(25)与滑块(25)之间的对称点18)分别安装有相应的配重块(21)(22),以保证主轴(7)转动的动平衡。
如图1所示,送料夹紧系统由固定夹具(16)、活动夹具(14)和电动丝杠螺母传动副(13)组成。 固定夹具(16)和活动夹具(14)均为电动夹具。 如图5所示,由电机(27)、齿轮传动副(29)(30)(31)(32)、螺杆传动副(33)(34)(37)(39)组成( 40)(41)、夹紧块(35)(36),电机(27)的动力通过齿轮(29)(30)带动两螺杆(34)(39)同向旋转( 31)(32)、螺杆(34)(39)同向旋转。 34)(39)是双旋转螺杆。 螺杆(34)(39)的旋转使螺母(34)(37)(40)(41)同时向内或向外移动,驱动夹紧块。 (35)(36)夹紧或松开工件。
固定夹(16)整体固定安装在机身(1)上。 其作用是夹紧工件进行切割。 它仅执行松开和夹紧动作。
移动夹具(14)整体可移动,安装在导柱(11)上。 其主要作用是夹紧工件(12)并将其向前传送。 设有电动螺杆(13),并由电动螺杆(13)驱动。 它可以左右移动,它的另一个作用是在切割时将工件(12)与固定夹具(16)一起夹紧,起到双重夹紧作用。
CNC系统控制进给电机(25)、进给电机(13)和两个电动夹电机(27)。 数控系统借用了数控车床的两轴数控系统。 进给电机(25)和进给电机(13)均采用步进电机或伺服电机,分别控制X轴和Z轴功能,可以使进给电机(25)按需要进行切削运动。速度和行程,可以使送料电机(13)按照需要的速度和行程进行送料。 运动时,两台电动夹钳电机(27)均为减速电机,由数控系统的M或S功能控制其正反转的时间和停止。 同时并联有手动控制电路(10),可进行手动控制。
现在选择一个典型的程序来准备工作描述。 装入工件(12)后,手动控制固定夹具(16)和活动夹具(14)夹紧工件(12),刀具(26)退至零位并启动。 主电机(17)转动主轴(7),启动冷却水泵(15),喷出冷却水; 切割工作启动程序,刀具(26)轴向进给管子(12)进行圆周切割。 切割完成后,继续刀电机(25)快速反转,刀具(26)快速退出,松开固定夹具(16),活动夹具(14)向左移动下料长度,送料完成后,固定夹钳(16)夹紧,活动夹钳(14)),将活动夹钳(14)向右移动冲裁长度后夹紧,完成一个工作循环。
本实用新型采用进给电机与主轴一起旋转的结构,大大简化了旋刀法的机械结构。 它采用数控系统,实现全自动控制和连续切割,提高切割效率和切割质量,减轻劳动强度。
1.一种全自动数控秋葵app福引导入口,由机体(1)、切割系统(8)、送料夹紧系统(13)(14)(16)、数控系统(9)、冷却装置组成系统(15),其特征在于,切割系统具有主轴(7),主轴(7)上固定有进给电机(25)。 电机通过齿轮(20)(23)(24)带动丝杆(19)旋转,丝杆(19)使滑块(18)作直线运动。 滑块(18)配备有切削工具(26)。 电机(26)的动力通过电刷(4)和电环(5)引入。 电机(26)内与滑块(18)对称处安装有相应的配重块(21)(22)。 送料夹紧系统由固定夹具(16)、活动夹具(14)、电动丝杠螺母传动副(13)组成。 ,动钳(14)的结构与定钳(16)相同。 整体安装在导柱(11)上,导柱(11)上安装有电动螺杆(13)、固定钳(16)和活动钳(14)。 )均为电动钳,由电机(27)、齿轮传动副(29)(30)(31)(32)、丝杠传动副(33)(34)、夹紧块(35)组成( 36)。 电机通过齿轮(29)(30)(31)(32)带动螺杆(34)(39)旋转。 螺杆(34)(39)为双旋转螺杆,数控系统(9)控制进给电机。 (25)、进给电机(13)、两台电动夹钳电机(27)、切割系统(8)由主轴(7)、进给电机(25)、传动系统(20)(23)(24) )(19))(26)(18),由电刷(4)、电环(6)、切刀、配重块组成。 除刷子外,均安装在主轴上并随主轴一起旋转。 电机的动力通过电刷传递。 环引导; 传动系统由齿轮传动副和丝杠螺母传动副组成,将电机的旋转运动减速并转换为刀具的直线运动; 送料夹紧系统由固定夹具、活动夹具、电动丝杠螺母传动副组成,固定夹具和活动夹具均为电动夹具,由电机、齿轮传动副、丝杠传动副组成,和一个夹紧块; 活动夹具安装在导柱上,与电动丝杠螺母传动副连接,由电机驱动。 工件进行进给运动; 数控系统控制进给电机、进给电机、两个电动夹钳电机。
2.根据权利要求1所述的全自动数控秋葵app福引导入口,其特征在于,所述数控系统(19)借用数控车床双轴数控系统,进给电机(25)和进给电机(13)均为双轴数控系统。步进电机。 或者是伺服电机,分别控制X轴和Z轴功能。 两台电动夹电机(27)为减速电机,由数控系统的M或S功能控制,与手动控制电路(10)并联。
专利摘要:一种全自动数控秋葵app福引导入口,包括机体、切割系统、送料夹紧系统、数控系统、冷却系统。 切割系统有一个主轴,其上固定有进给电机。 电机通过齿轮带动螺杆旋转。 螺杆使滑块作直线运动,滑块上装有切削刀具。 电机的动力通过电刷和电环引入。 送料夹紧系统由固定夹具、活动夹具、电动丝杠螺母传动副组成。 固定钳和活动钳均为电动钳。 数控系统控制进给电机、进给电机和两个电动钳电机。 同时并联有手动控制电路。 大大简化了旋转刀切割的机械结构,实现了全自动控制,提高了切割效率。 切割质量好,降低劳动强度。
文件编号 B21D43/02GK2871076SQ2
公布日期 2007年2月21日 申请日期 2005年10月17日 优先权日 2005年10月17日
发明人 卢文辉 申请人:卢文辉
热线电话:18796838612
联系人:朱经理
手机:18796838612
邮箱:1044463515@qq.com
地址:江苏省苏州市张家港东莱华宇路28号